Research
Our research combines
Theoretical analysis for determination of fundamental performance limits;
The design of practical algorithms that approach such uitimate limits; and
Experimentation for validation and development of practically feasible techniques.
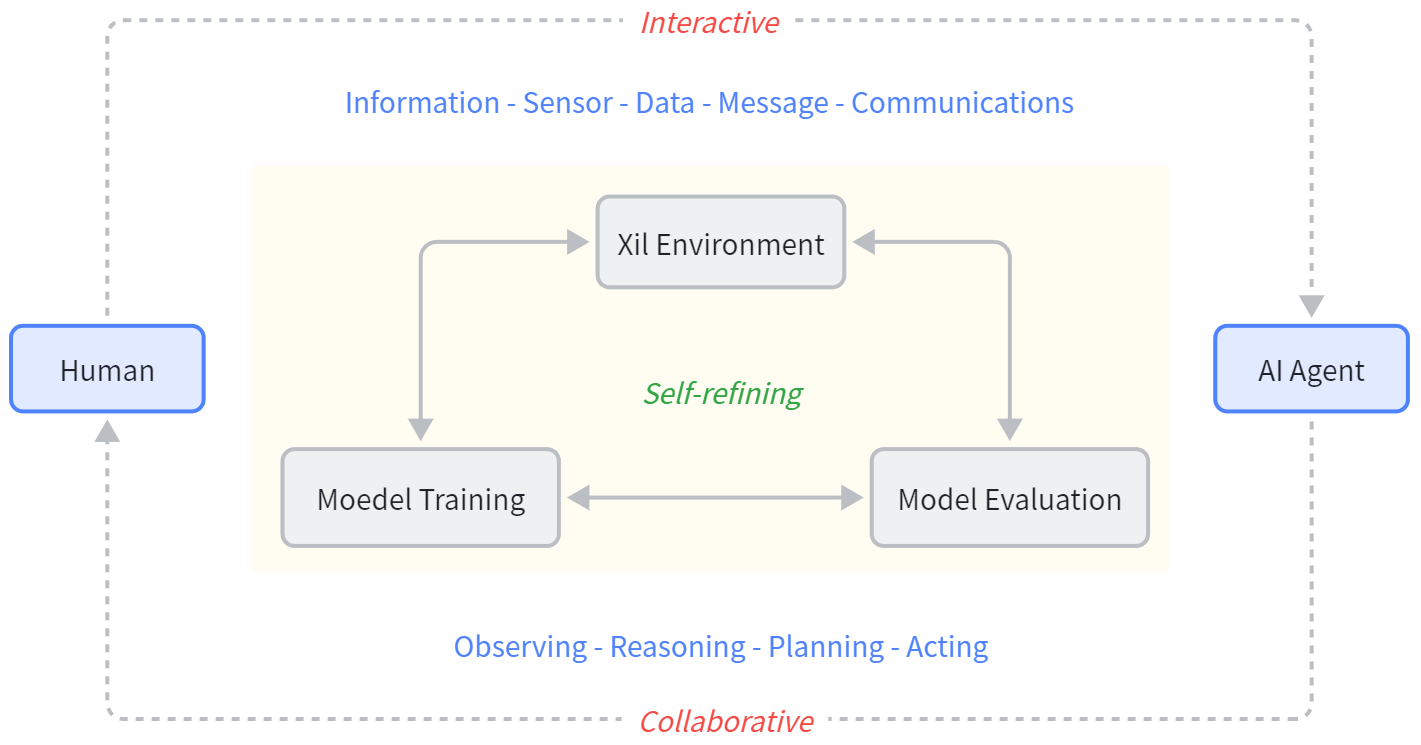
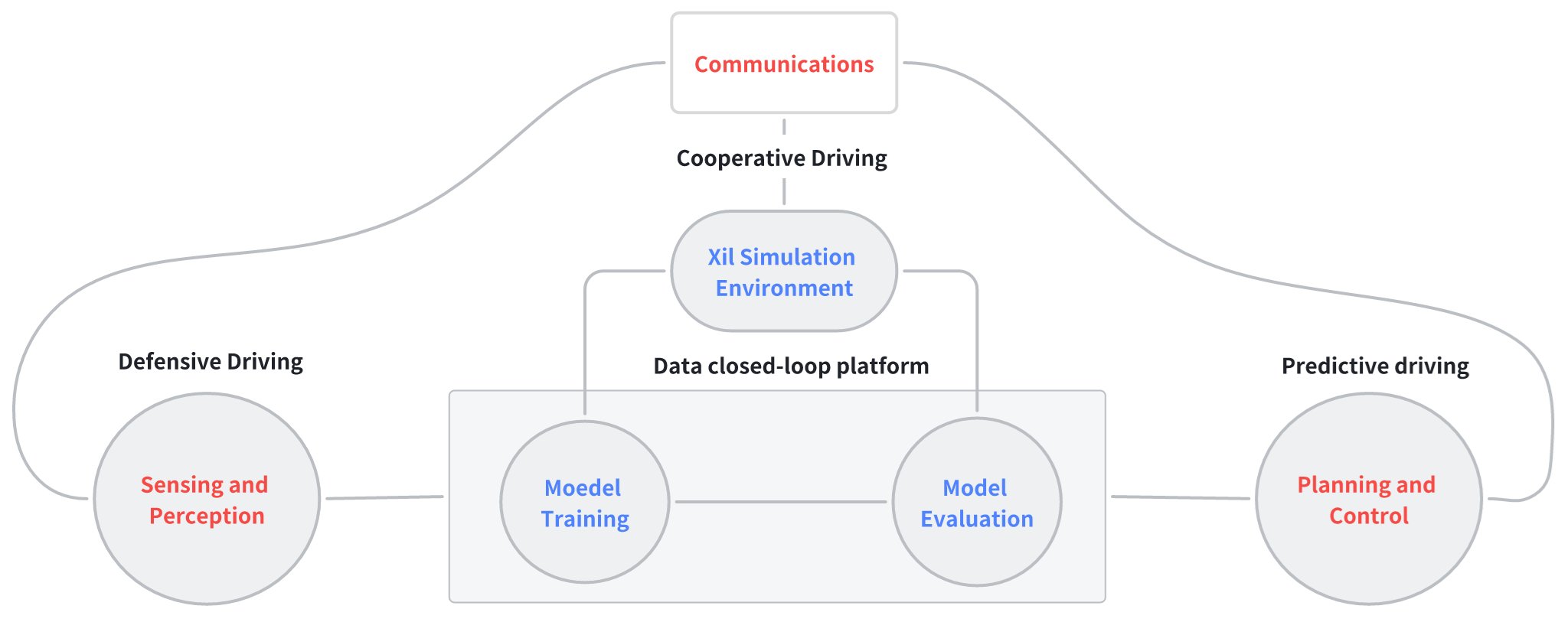
How to work with AI agents to achieve a common goal in complex and dynamic environments?
 |
 |